| Name | Last modified | Size | |
|---|---|---|---|
 | JIPSS-Unbemannte_Luftfahrzeuge_im_Ukraine_Krieg-Truffer.pdf | 2023-07-07 05:13 | 2639 KB |
| RMS_Article Drone.pdf | 2023-07-07 05:14 | 3845 KB |
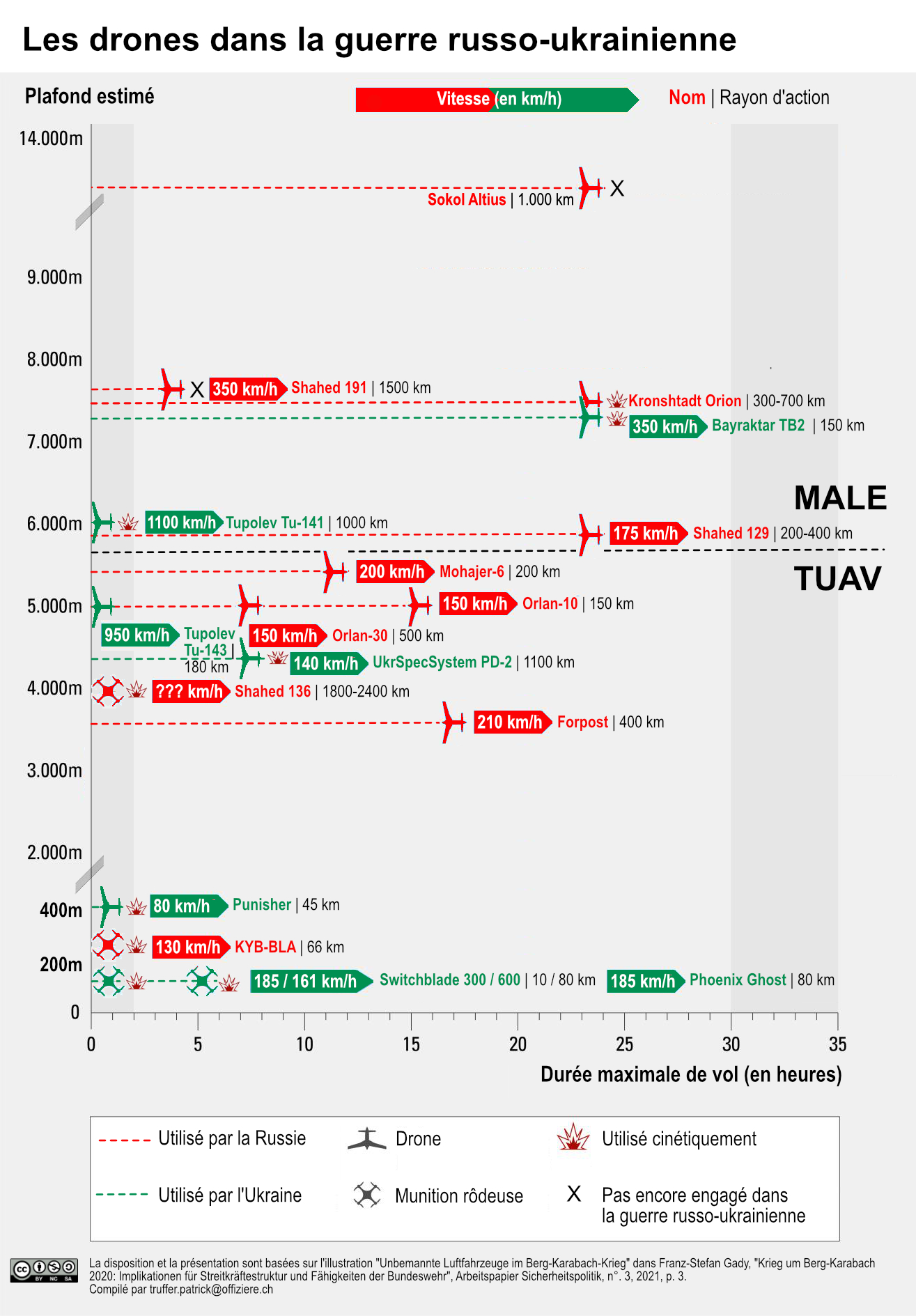
| Unbemannte_Luftfahrzeuge_im_Ukraine-Krieg-französisch.jpg | 2023-01-04 10:29 | 794 KB |
| Unbemannte_Luftfahrzeuge_im_Ukraine-Krieg-französisch.tiff | 2023-01-04 10:29 | 1722 KB |
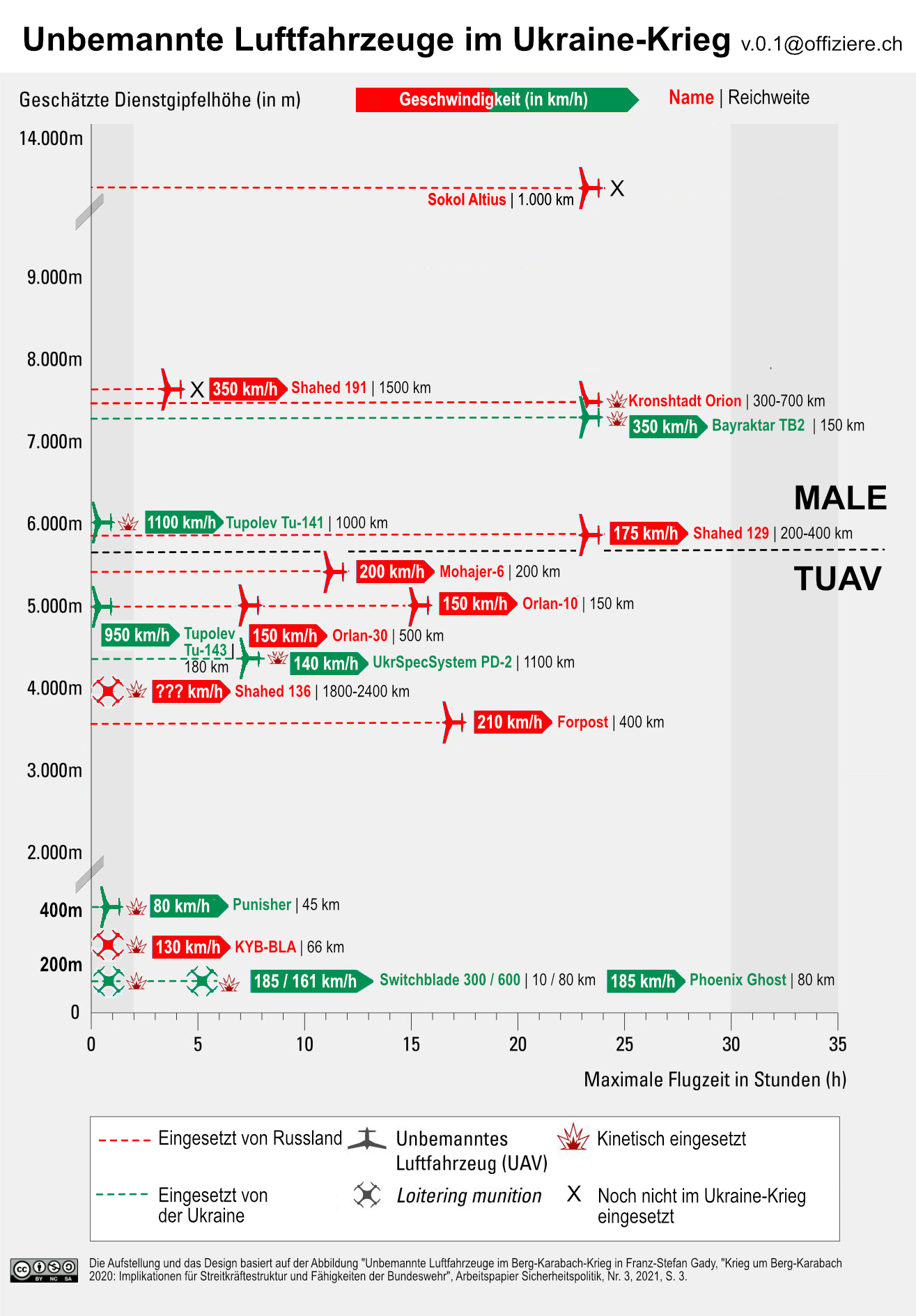
| Unbemannte_Luftfahrzeuge_im_Ukraine-Krieg-v01.jpg | 2022-12-30 18:13 | 809 KB |
{kind=link}
{kind=link}